










 Brian Curtis
Brian Curtis 0
0  3570
3570 742
742
Samochody zdalnie sterowane są zabawne, jasne, ale samodzielna jazda roboty samochodowe są jeszcze bardziej zabawne. W tym samouczku zbudujemy czterokołowego robota, który może jeździć i omijać przeszkody. Kupiłem ten kompletny zestaw 4WD od AliExpress, ale większość tych komponentów można łatwo kupić w sklepie elektronicznym i samodzielnie złożyć.
Zalecam przeczytanie wszystkich instrukcji przed rozpoczęciem, ponieważ wyjaśni to niektóre rzeczy, które mogą być mylące za pierwszym razem. Może to również wyglądać na bardzo długi, zaawansowany projekt ze względu na długość instrukcji, ale w rzeczywistości jest dość prosty. Nie musisz się zastraszać - jest to projekt dla początkujących, z którym możesz uzyskać satysfakcjonujące wyniki, a następnie rozwijać go, gdy uczysz się więcej. Nie podoba ci się ten styl robota? Oto kilka robotów Arduino 8 robotów Arduino, które możesz zbudować za mniej niż 125 USD 8 robotów Arduino, które możesz zbudować za mniej niż 125 USD Arduino może wiele zrobić, ale czy wiesz, że potrafi tworzyć pełnoprawne roboty? Za całkiem tanio! zamiast tego możesz łatwo zbudować.
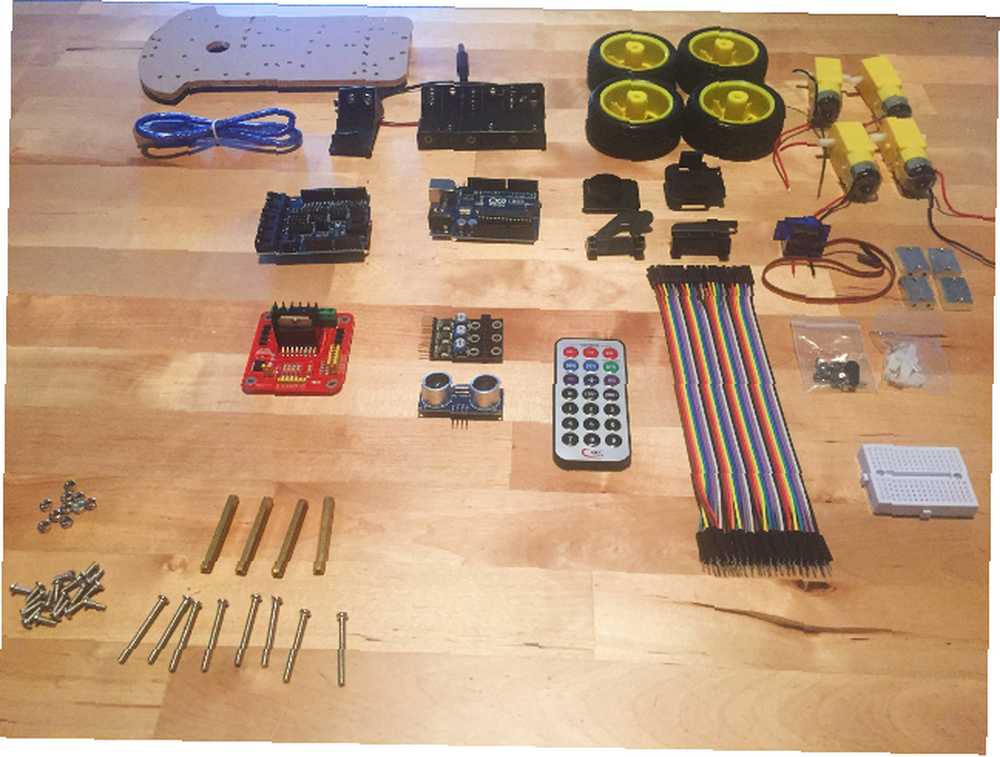
Oto, co mamy, po wyjęciu wszystkiego z opakowania:
Na początek przymocujemy silniki i mostek H (kartę, która dostarcza moc do silników) do dolnej części podwozia. Najpierw przymocuj cztery metalowe wsporniki (są to prostokątne, wiercone bloki z metalu) do każdego silnika za pomocą dwóch długich śrub i dwóch nakrętek.
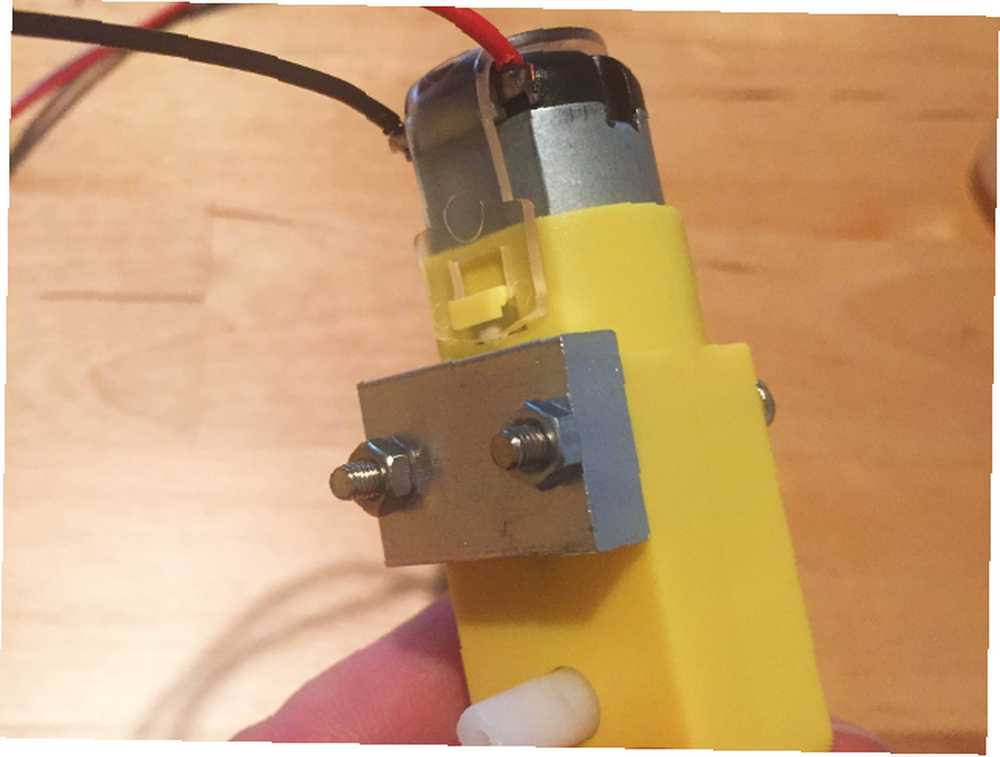
Musisz upewnić się, że są one prawidłowo przymocowane, więc sprawdź obraz poniżej, aby upewnić się, że bok bloku z dwoma wywierconymi otworami będzie skierowany w dół. Zwróć uwagę, że przewody każdego silnika są skierowane w stronę środka podwozia.
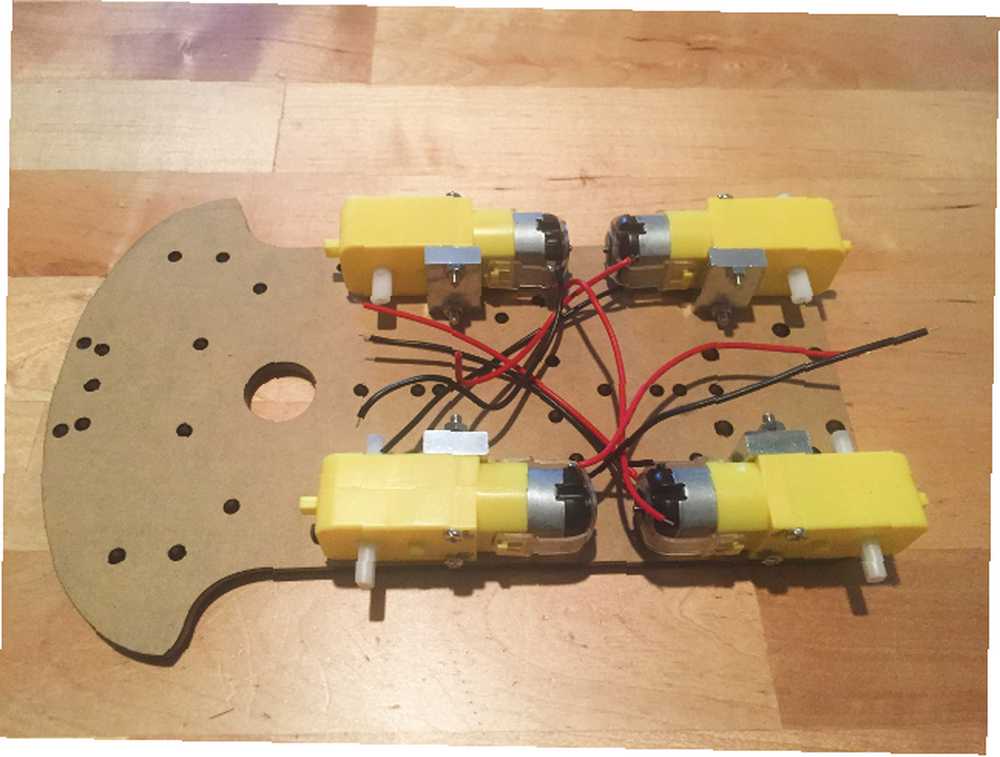
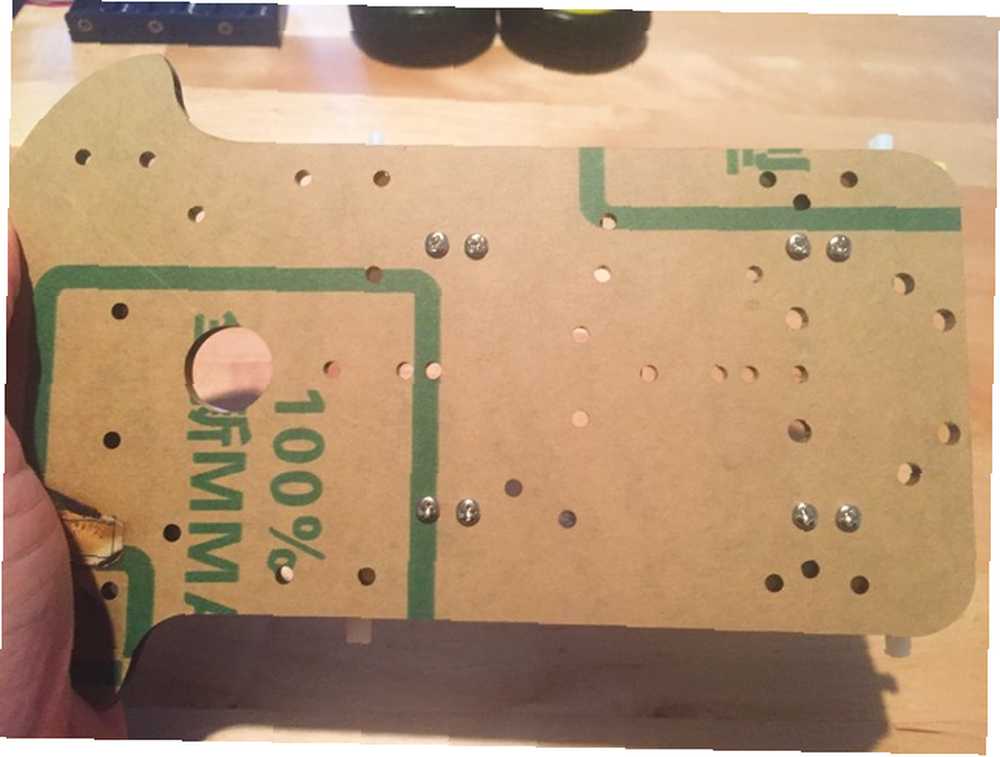
Teraz każdy silnik można przymocować do podwozia za pomocą dwóch krótkich śrub w dolnej części każdego metalowego wspornika. Oto widok dolnej części podwozia, dzięki czemu możesz zobaczyć, gdzie muszą znajdować się śruby:
Następnym krokiem jest przymocowanie mostka H (czyli czerwonej tablicy, w moim zestawie) do podwozia. Zanim to zrobisz, możesz poczekać, aż wszystkie druty zostaną podłączone do mostka H. Ale to zależy od ciebie (uważam, że jest łatwiej). Szybka uwaga: w moim zestawie brakowało kilku elementów złącznych, więc użyłem taśmy elektrycznej do zabezpieczenia mostu. Możesz jednak zobaczyć, gdzie poszłyby śruby i nakrętki:
Teraz, kiedy mostek H został podłączony, możesz rozpocząć okablowanie zasilacza. Ponieważ uchwyt baterii sześciu AA jest wyposażony w adapter prądu stałego, musisz albo odciąć koniec (co zrobiłem), albo poprowadzić przewody łączące do samych akumulatorów.

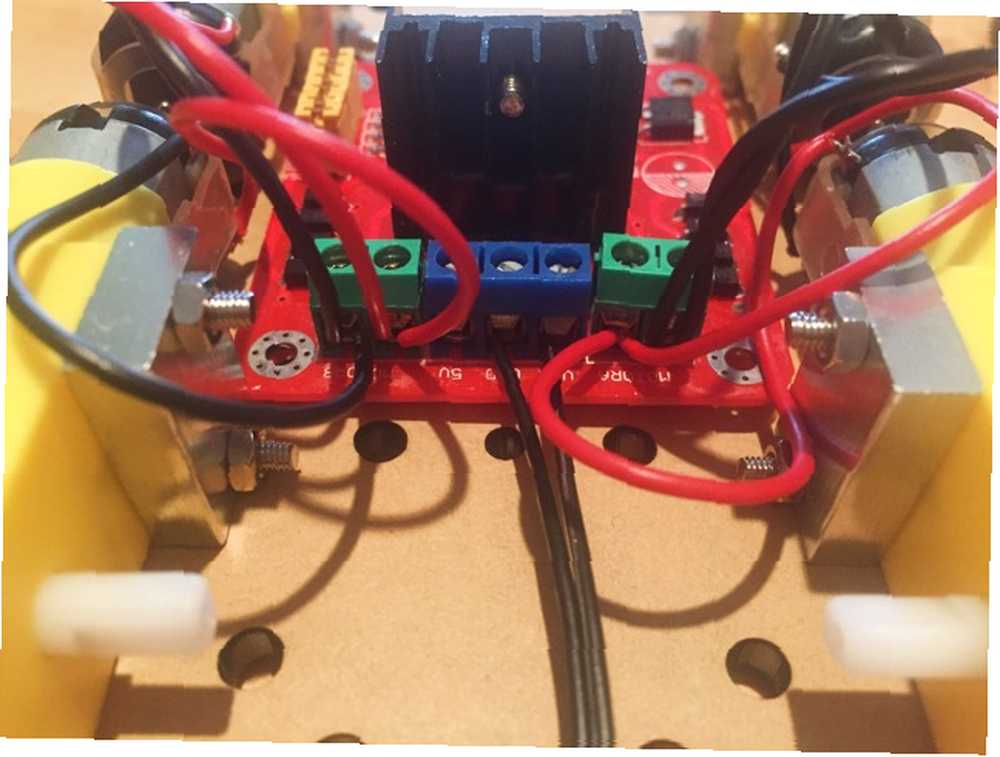
Bez względu na to, jak zdecydujesz się to zrobić, poprowadzisz przewód dodatni do oznaczonego portu “VMS” oraz przewód ujemny do oznaczonego “GND” na moście. Przykręć elementy mocujące i upewnij się, że są bezpieczne. Następnie podłącz przewody silnika. Po obu stronach jest zestaw dwóch portów; jeden jest oznaczony “MOTORA” i inni “MOTORB.” Obie czerwone przewody z każdej strony wejdą do środkowego zielonego portu, a oba czarne przewody przejdą do najbardziej zewnętrznego. To zdjęcie powinno wyjaśnić:
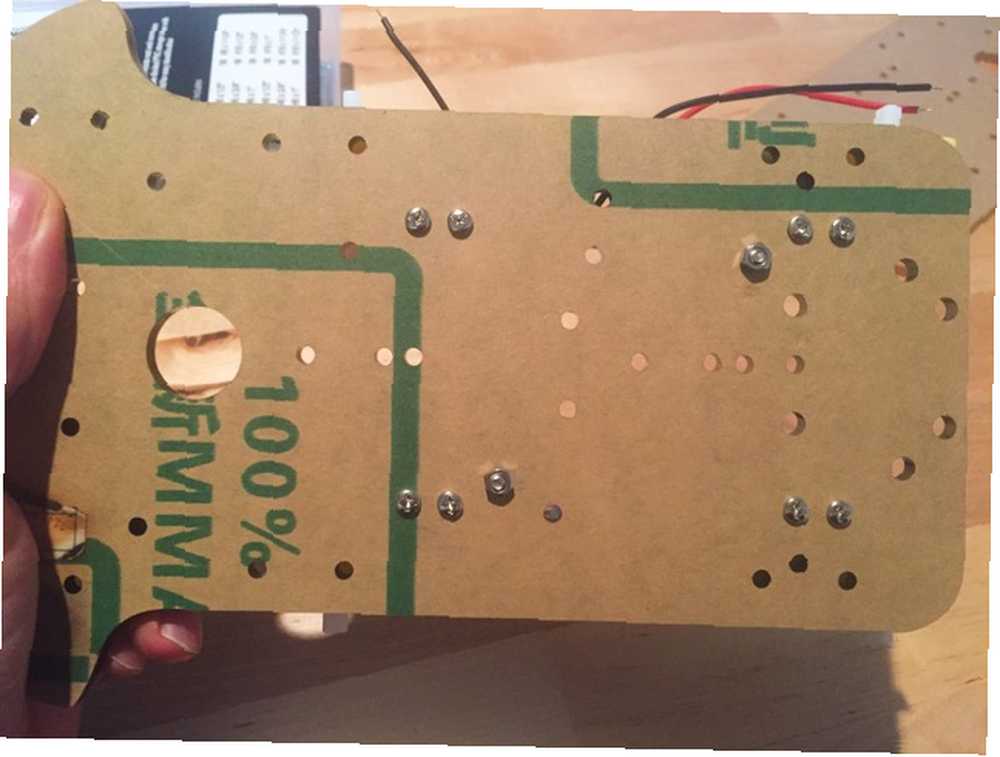
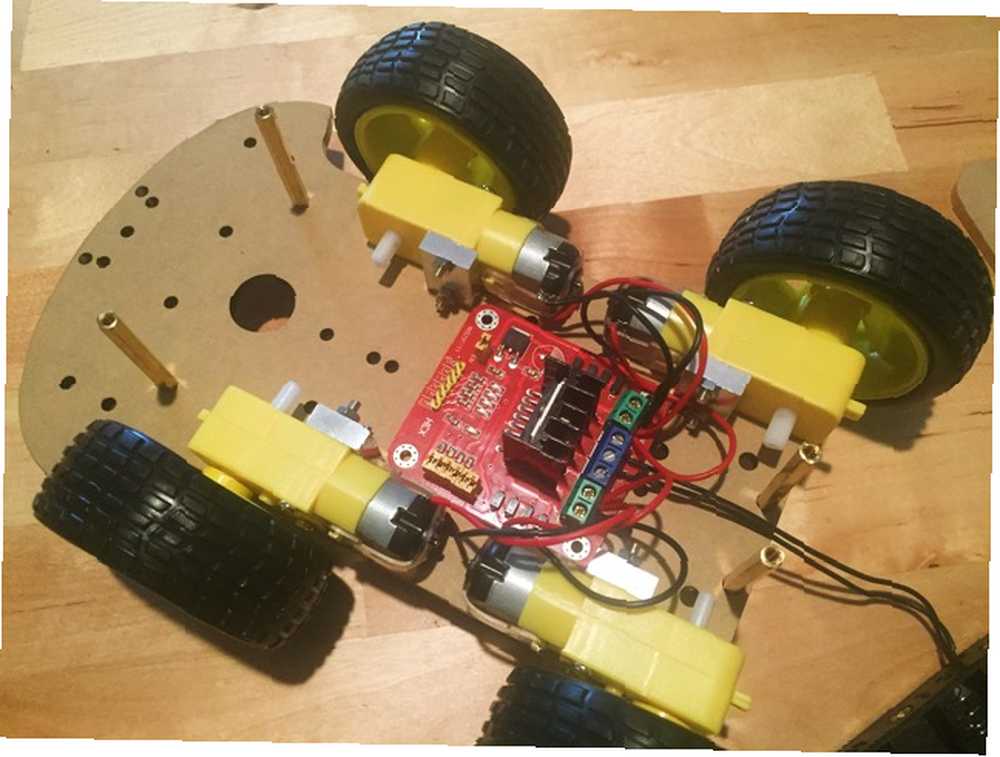
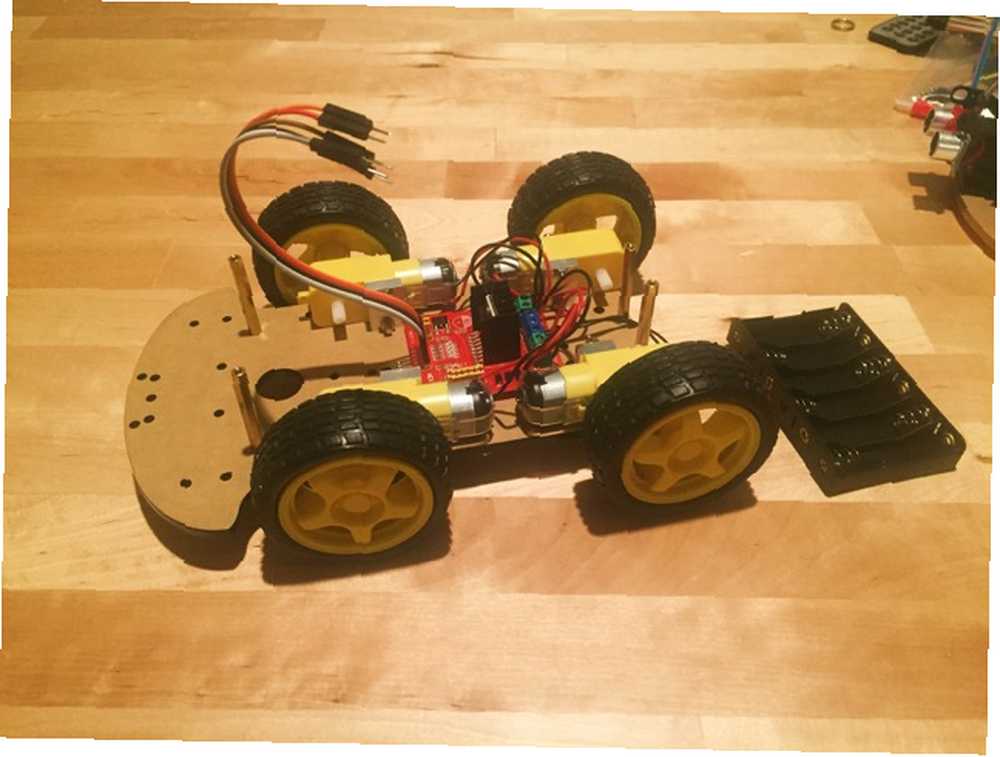
Odkryłem, że musiałem zdjąć część obudowy z przewodów silnika, aby to zadziałało. Teraz, gdy masz już podłączone silniki i zasilacz, wsuń koła na wały napędowe silnika i zamocuj cztery miedziane wały w miejscach pokazanych na poniższym obrazku (każdy miedziany wał potrzebuje jednej małej śruby). Ten robot zaczyna nabierać kształtu!
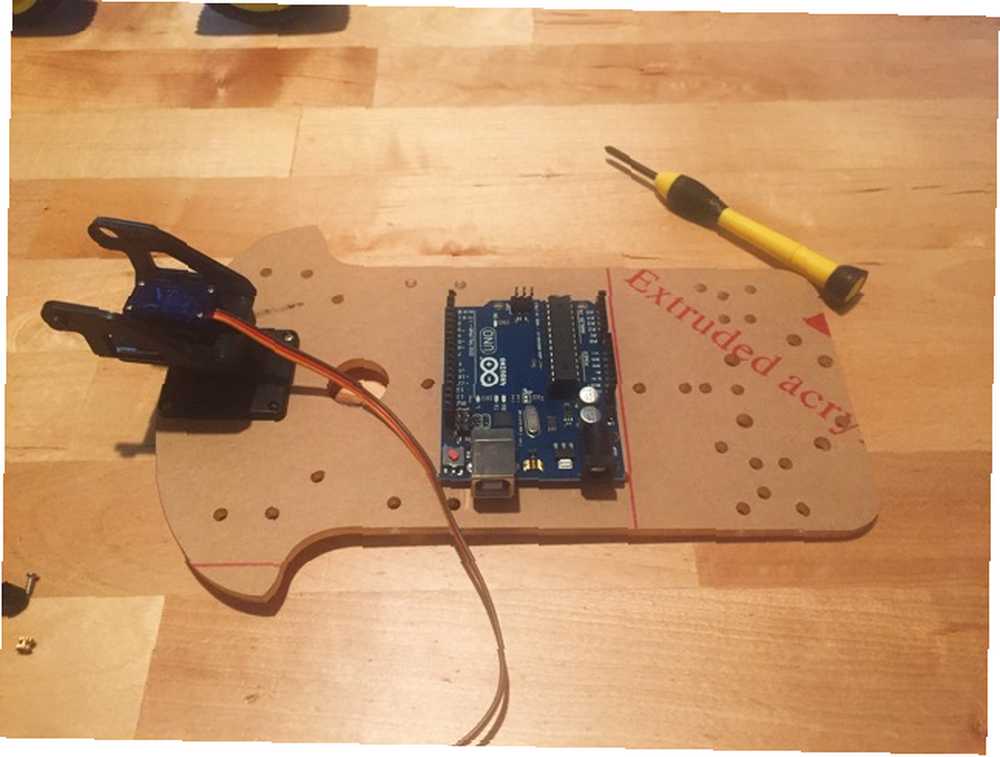
Teraz odłóż tę część podwozia na bok i chwyć drugą, która usiądzie na górze. Następnym krokiem jest ponowne podłączenie Arduino - musiałem użyć taśmy elektrycznej, ale powinieneś być w stanie lepiej zabezpieczyć swoje za pomocą śrub i nakrętek.
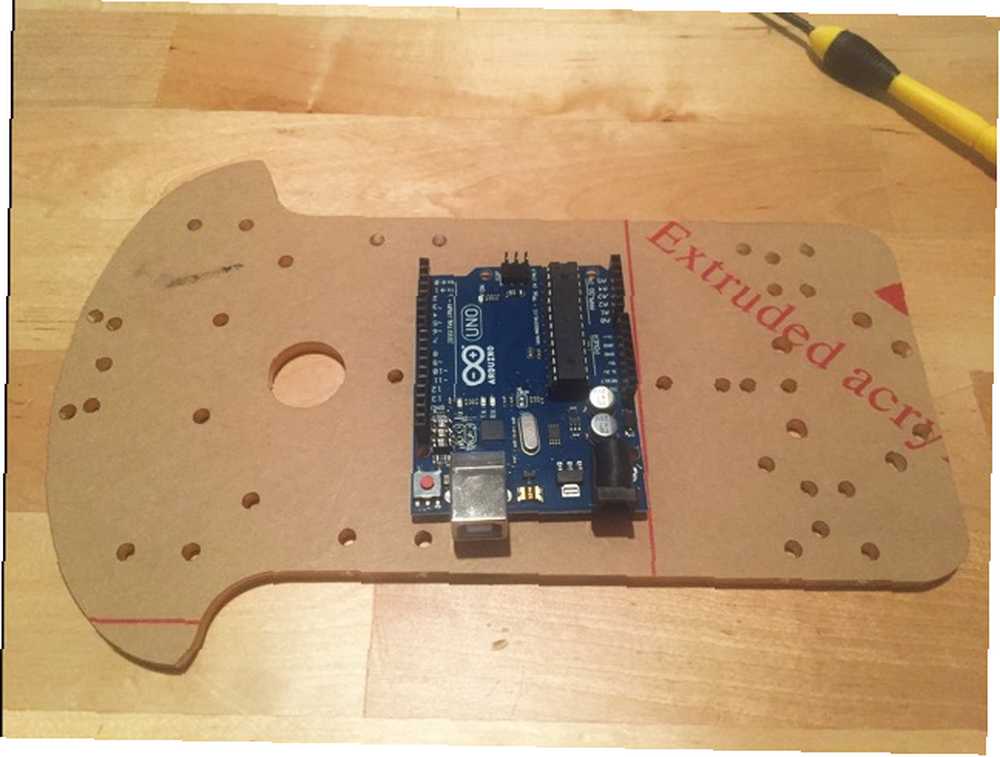
Następny krok wymaga mikro serwo, czarnej poprzeczki, uchwytu serwa (który składa się z trzech czarnych plastikowych elementów) i kilku małych śrub. Użyj jednej z większych ostrych śrub w zestawie, aby przymocować czarny krzyż do mikrosilnika:
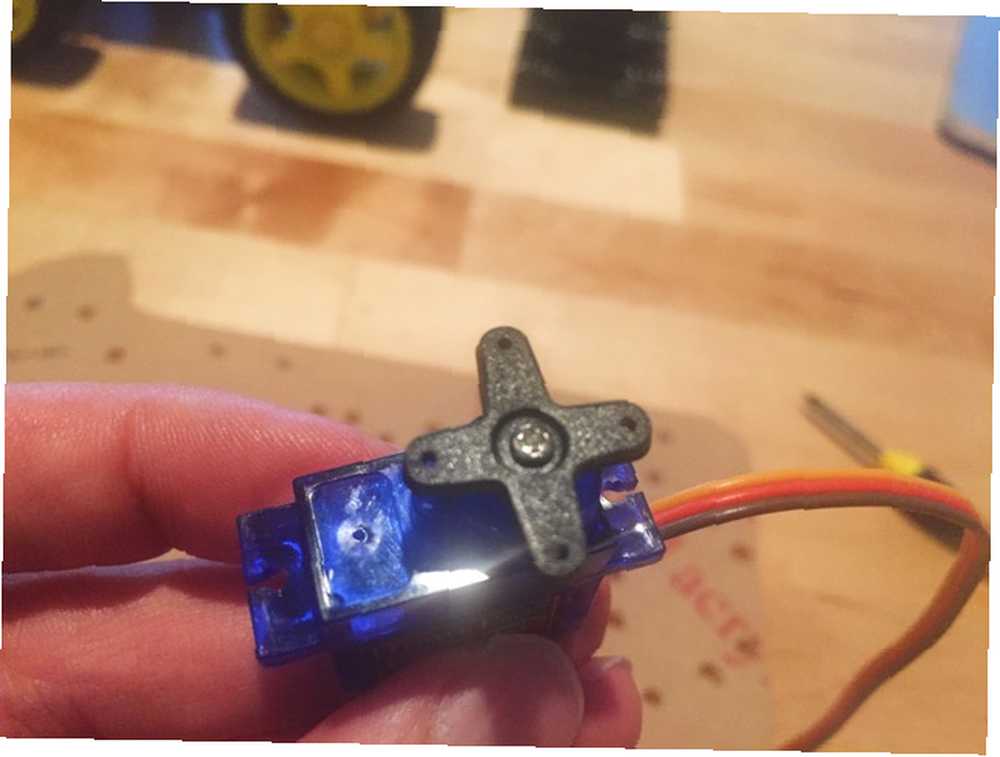
Następnie odwróć serwo do góry nogami w czarny plastikowy pierścień uchwytu. Upewnij się, że druty wychodzące z serwomechanizmu są skierowane w tym samym kierunku co dłuższa część uchwytu (ponownie, patrz rysunek poniżej) i użyj czterech małych śrub do zamocowania poprzeczki (w uchwycie znajdują się cztery otwory, które wyrównać z otworami na poprzeczce).

Oto jak to wygląda po dołączeniu:
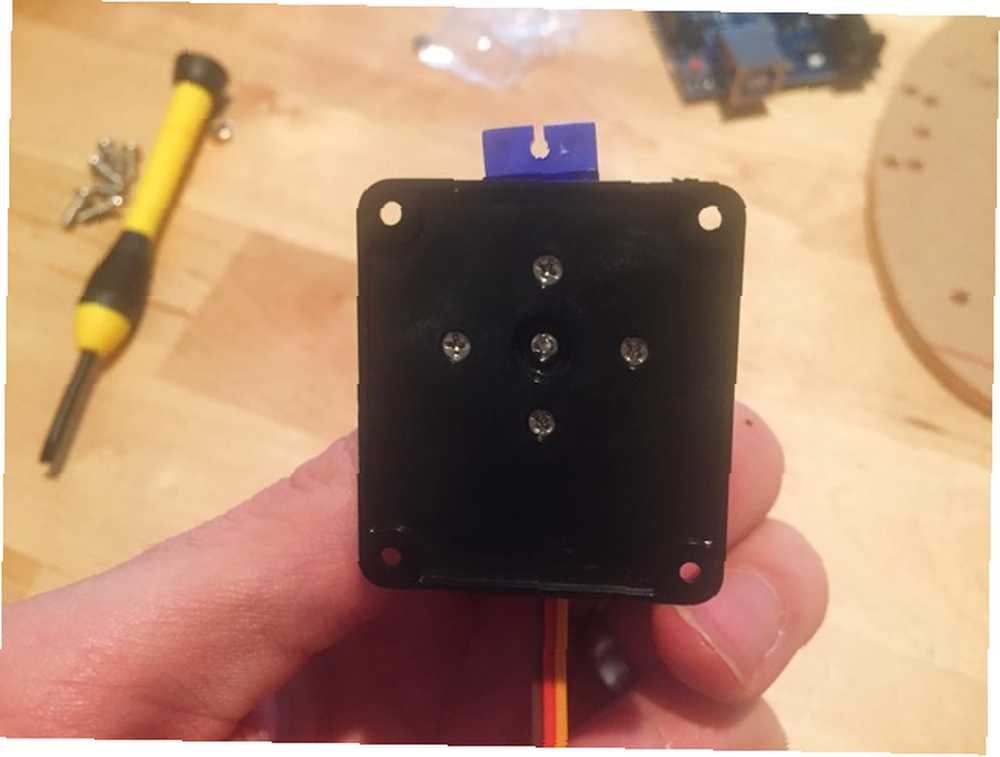
Na koniec weź pozostałe dwa elementy uchwytu serwomechanizmu i zatrzaśnij je na serwomechanizmie (w bocznych elementach znajdują się rowki, które pasują do plastikowego języczka na serwo).
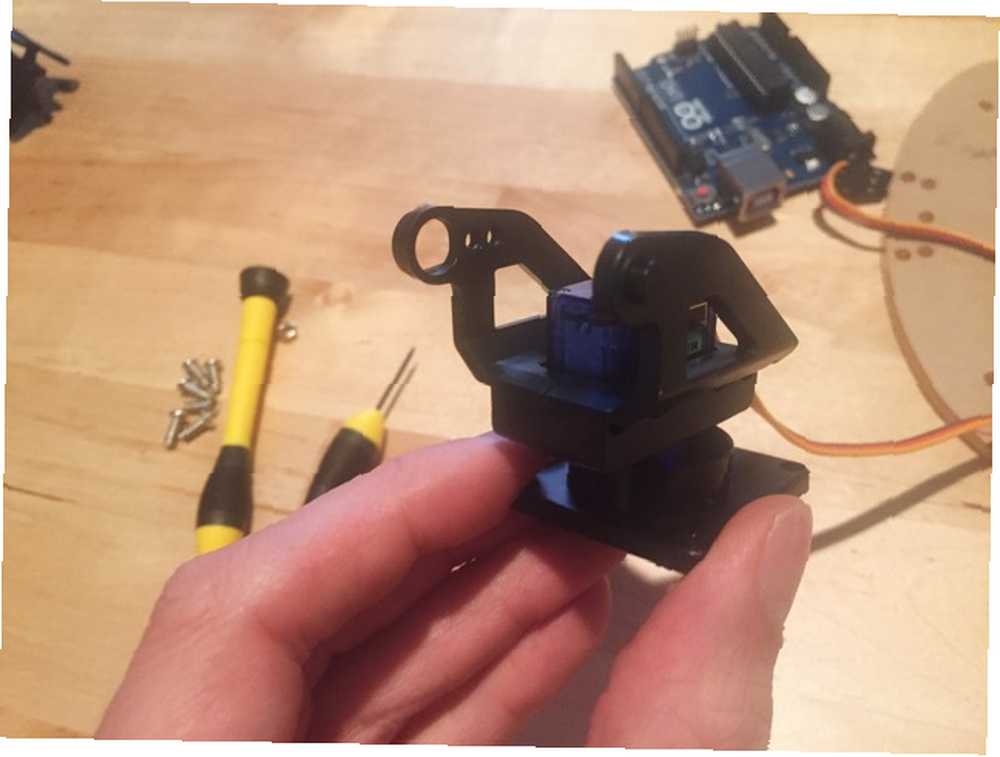
Teraz, gdy uchwyt serwomechanizmu jest gotowy, można go zamontować na ramie montażowej.
Oto gdzie idą śruby:
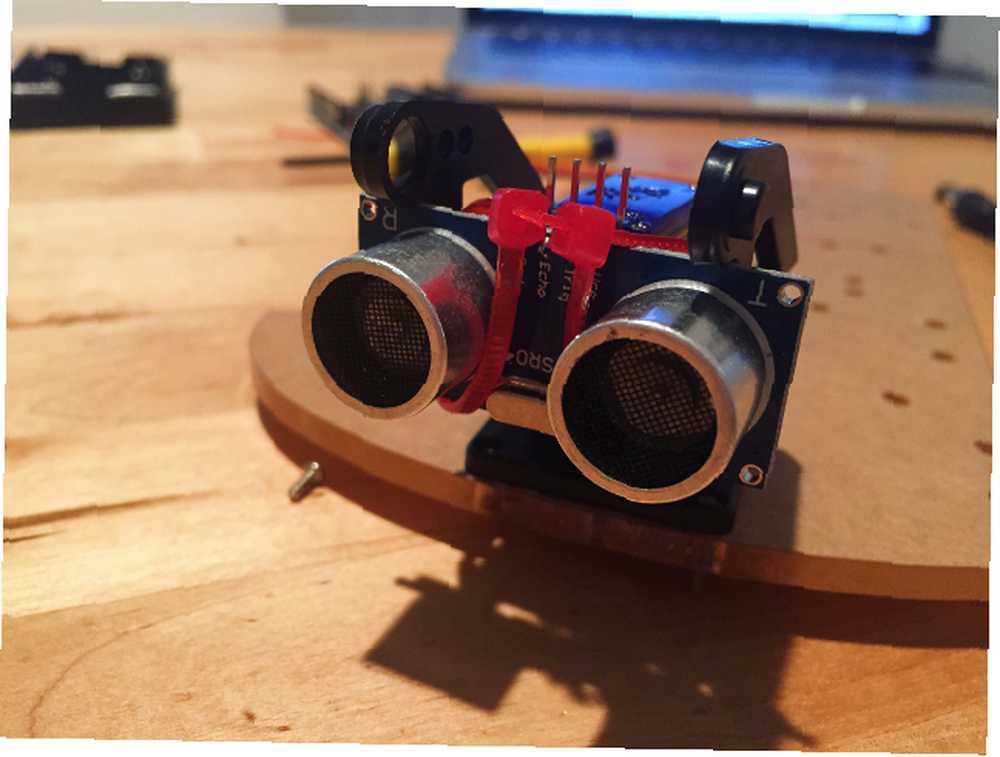
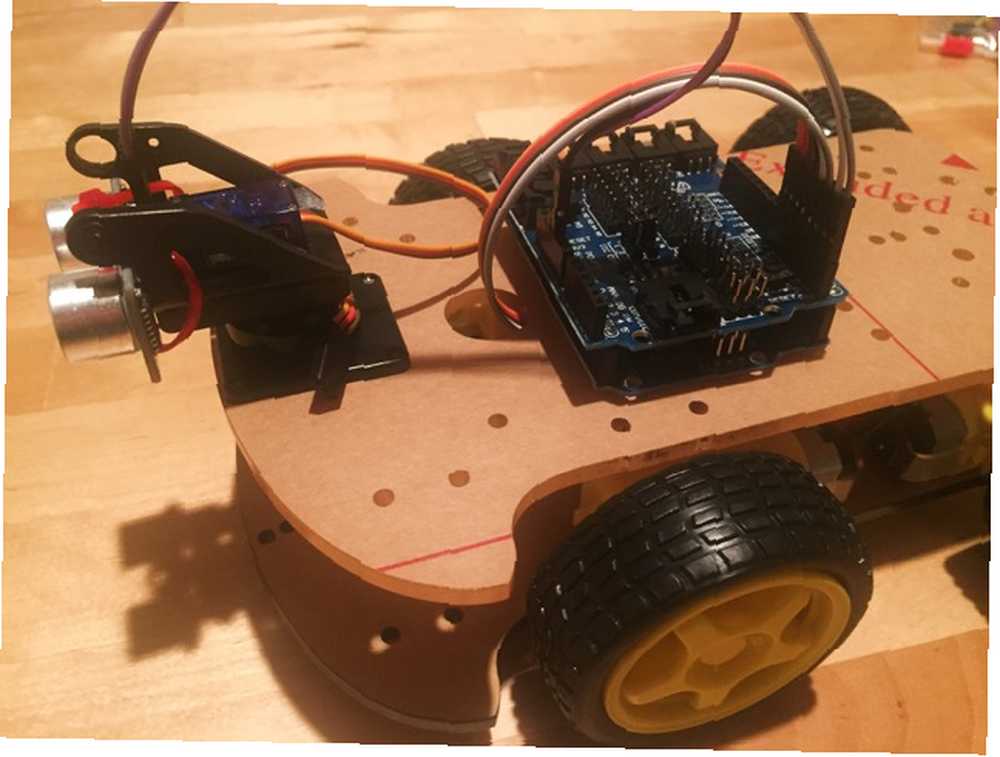
Czas spojrzeć na naszego robota. Przymocuj czujnik ultradźwiękowy do uchwytu serwomechanizmu za pomocą dwóch opasek zaciskowych.
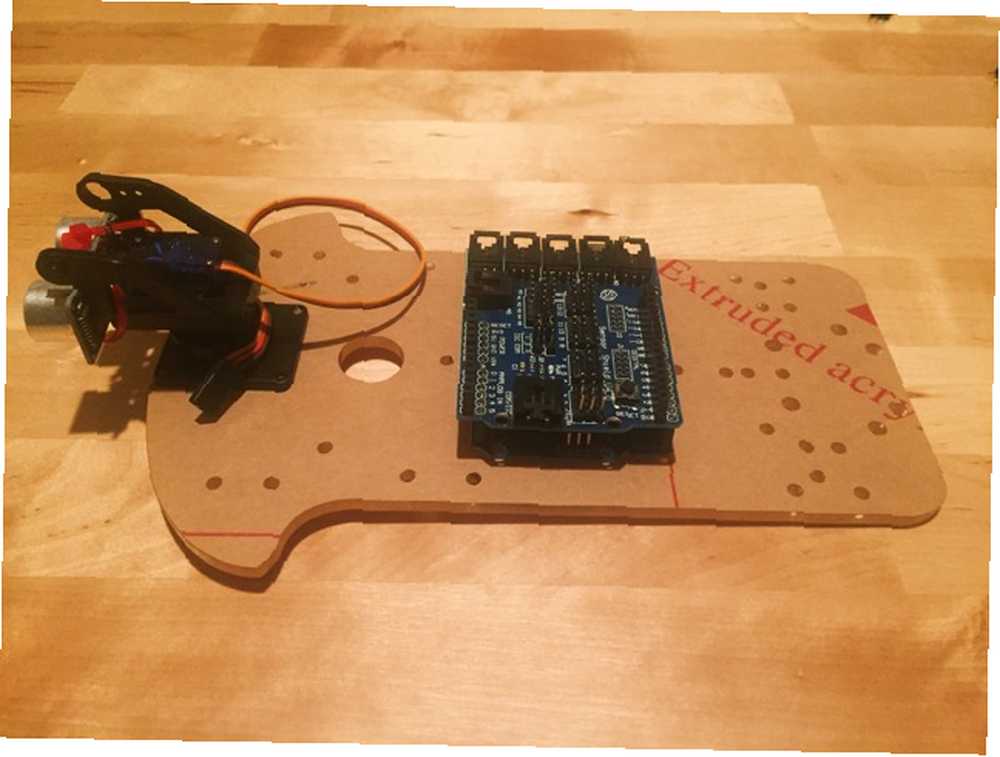
Jeśli pracujesz z tego samego zestawu co ja, otrzymasz tarczę czujnika Arduino. Nie będziemy go używać w tej wersji, ale możesz teraz umieścić go na UNO, jeśli chcesz (jak mam na poniższym obrazku). Po prostu wyrównaj piny u dołu ekranu z portami I / O w Arduino i naciśnij, aby je połączyć. W tej chwili nie jest Ci potrzebny, ale tarcze mogą się przydać. Top 4 Arduino Shields, aby wzmocnić Twoje projekty Top 4 Arduino Shields, aby wzmocnić Twoje projekty Kupiłeś zestaw startowy Arduino, przestrzegałeś wszystkich podstawowych przewodników, ale teraz natrafiłeś na przeszkodę - potrzebujesz więcej bitów i bobów, aby zrealizować swoje marzenie o elektronice. Na szczęście, jeśli masz ... .
Niezależnie od tego, czy podłączasz ekran czujnika, czy nie, potrzebujesz teraz czterech przewodów, aby podłączyć czujnik ultradźwiękowy do Arduino. Czujnik ma cztery styki: VCC, GND, TRIG i ECHO. Podłącz VCC do styku 5 V na Arduino, GND do GND, a TRIG i ECHO do styków 12 i 13.
Teraz chwyć dolną część podwozia i podłącz sześć zworek do styków we / wy mostka H (są oznaczone ENA, IN1, IN2, IN3, IN4 i ENB). Zwróć uwagę, które druty są podłączone do poszczególnych portów, o czym będziesz musiał później dowiedzieć się.
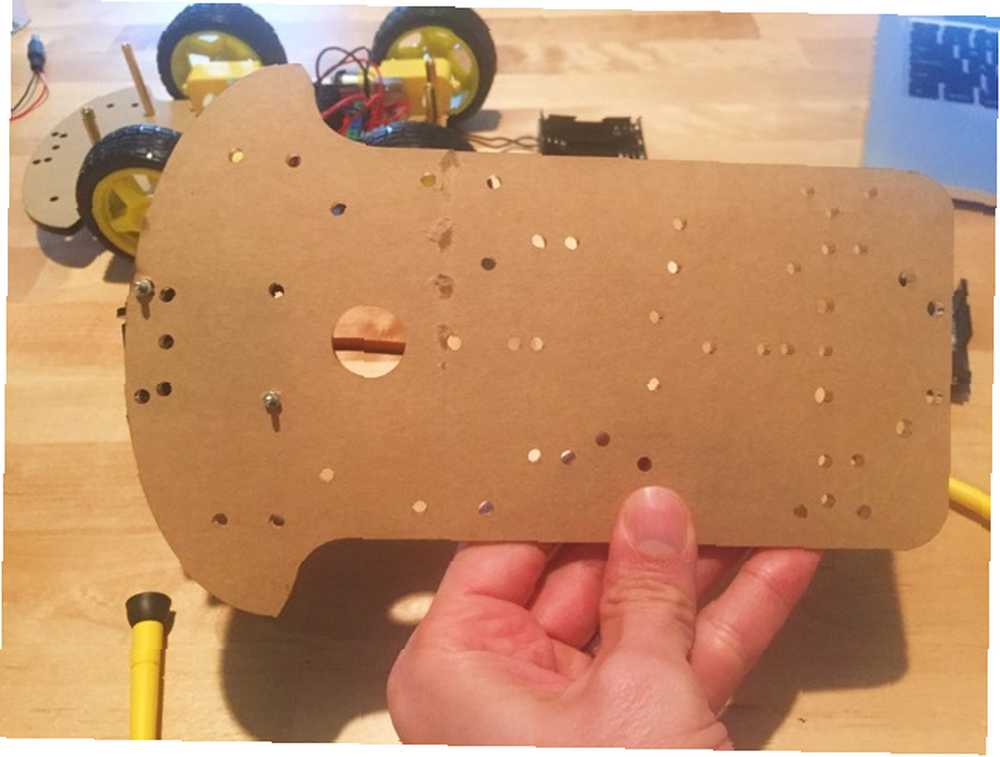
Teraz nadszedł czas, aby zacząć składać to w całość. Chwyć górną część podwozia i umieść ją na miedzianych trzonkach połączonych z dolną częścią i przeciągnij druty przymocowane do mostka H przez otwór w środku podwozia. Podłącz sześć przewodów do portów we / wy w następujący sposób:
- ENA do portu we / wy 11
- ENB do portu I / O 10
- A1 do portu we / wy 5
- Port A2 do I / O 6
- B1 do portu we / wy 4
- B2 do portu we / wy 3
Teraz użyj czterech krótkich śrub, aby przymocować górną część podwozia do miedzianych wałków. Ustaw uchwyt baterii sześciu AA na obudowie (przykręć go, jeśli możesz), przymocuj uchwyt baterii 9 V do Arduino, a ten bot będzie gotowy do działania!
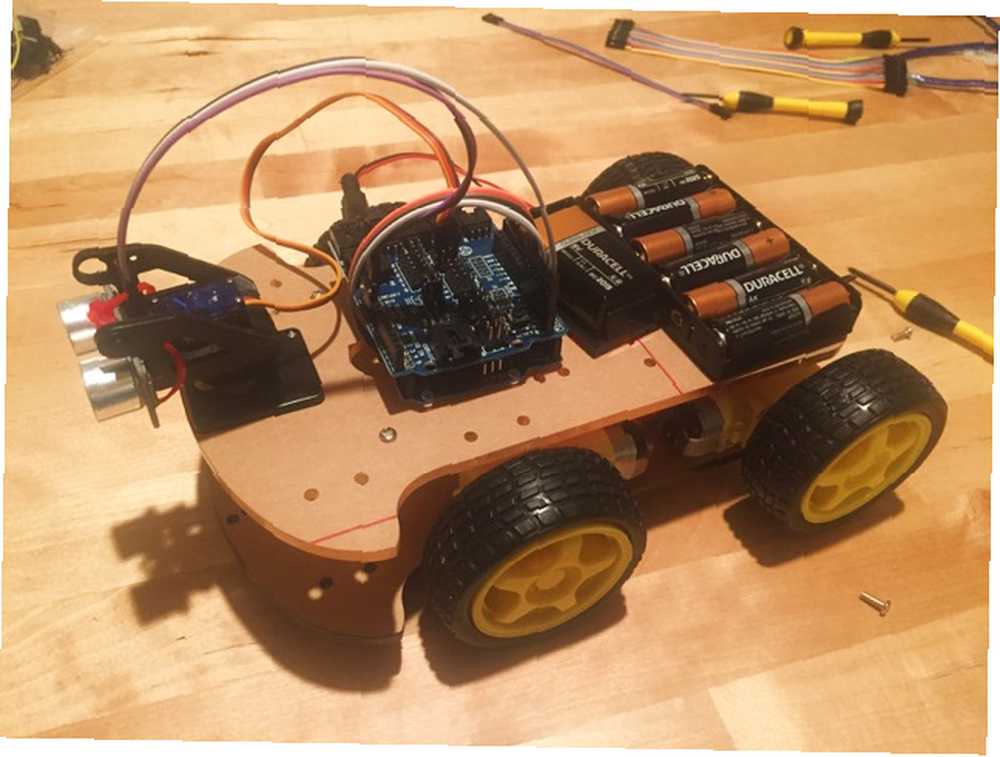
Cóż, prawie gotowy do rocka. Nie ma jeszcze dość osobowości.
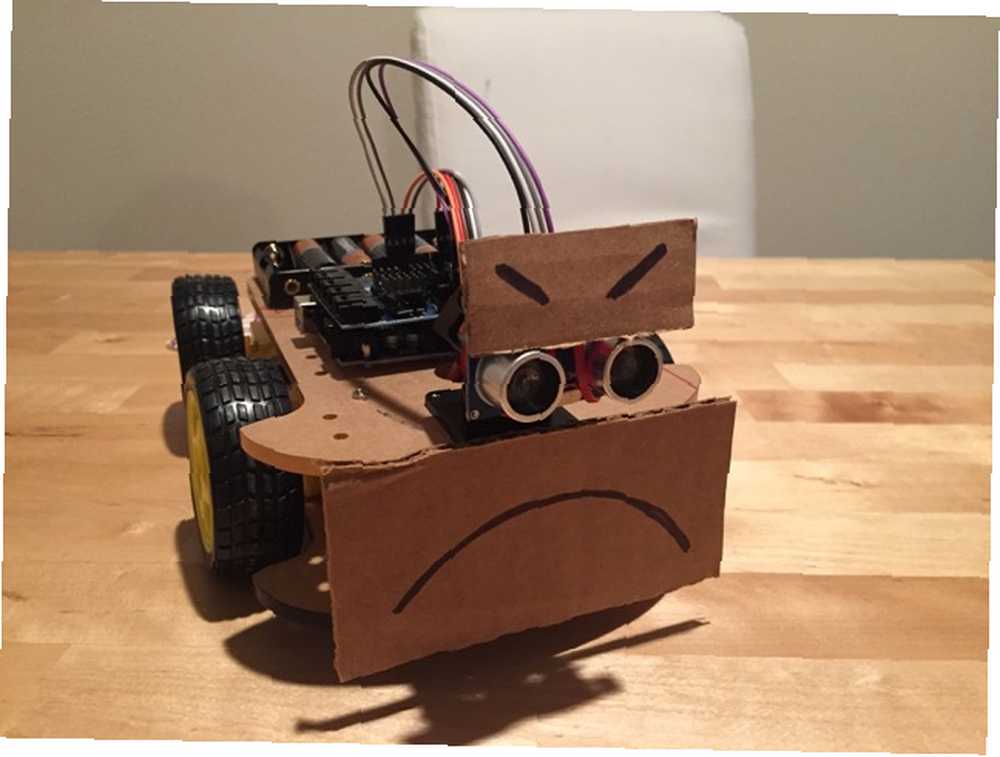
No to jedziemy. Teraz, aby dać mu mózg. Zróbmy trochę programowania.
Pierwszą rzeczą, którą zrobimy, jest sprawdzenie, czy most i silniki są prawidłowo podłączone. Oto krótki szkic, który każe botowi jechać do przodu przez pół sekundy, jechać do tyłu przez pół sekundy, a następnie skręcić w lewo i prawo:
To dużo kodu do prostego testu, ale zdefiniowanie wszystkich tych funkcji ułatwia późniejsze dostosowanie. (Wielkie podziękowania dla Billwaa za jego post na blogu dotyczący używania mostka H do definiowania tych funkcji.) Jeśli coś poszło nie tak, sprawdź wszystkie połączenia i czy przewody są podłączone do odpowiednich styków. Jeśli wszystko zadziałało, czas przejść do testu czujnika. Aby użyć czujnika ultradźwiękowego, musisz pobrać bibliotekę NewPing, a następnie użyć Szkic> Uwzględnij bibliotekę> Dodaj bibliotekę .ZIP… załadować bibliotekę.
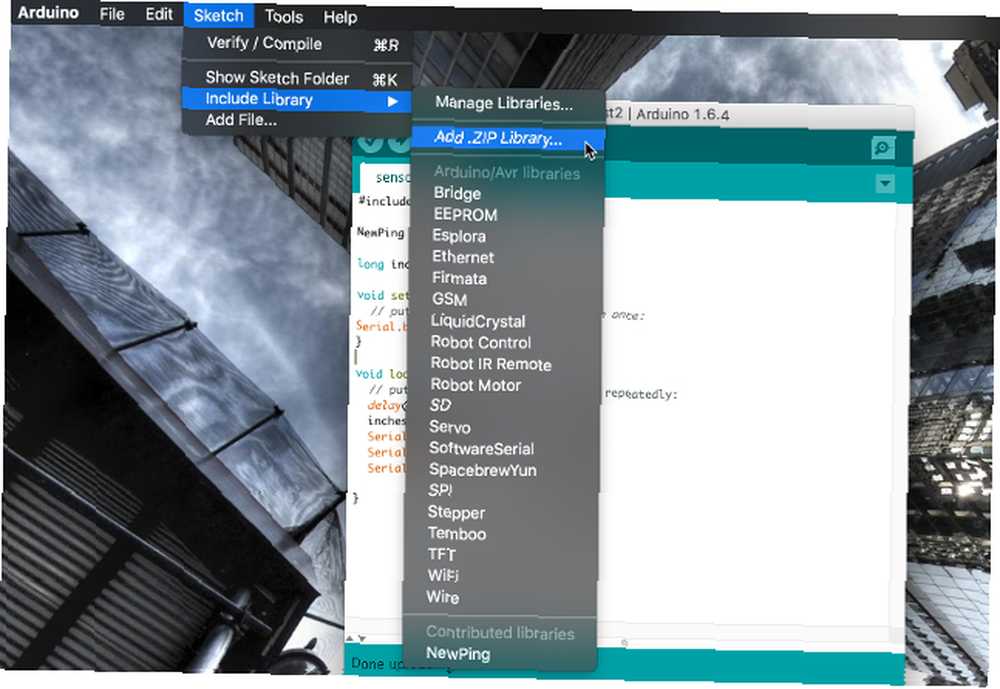
Upewnij się, że na górze szkicu znajduje się instrukcja include; jeśli nie, naciśnij Szkic> Uwzględnij bibliotekę> Nowy pakiet. Po zakończeniu załaduj następujący szkic:
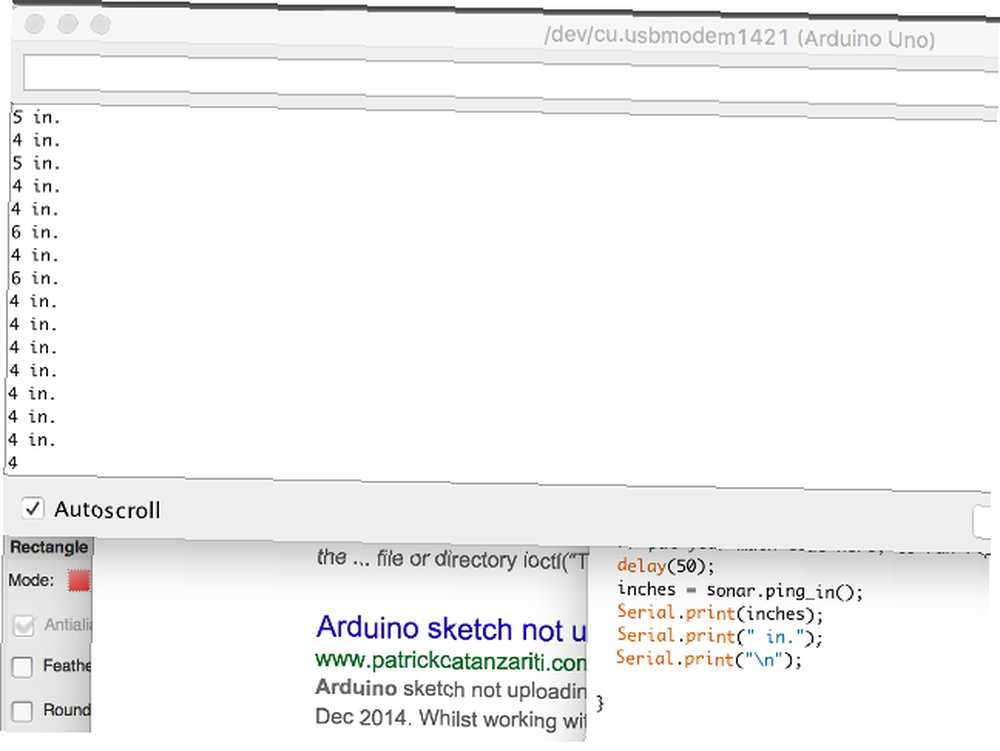
Prześlij szkic i otwórz monitor szeregowy za pomocą Narzędzia> Monitor szeregowy. Powinieneś zobaczyć szybko aktualizującą się sekwencję liczb. Przytrzymaj rękę przed czujnikiem i sprawdź, czy ta liczba się zmieni. Przesuń rękę do środka i na zewnątrz, a powinieneś uzyskać pomiar odległości dłoni od czujnika.
Jeśli wszystko działało poprawnie, nadszedł czas, aby złożyć wszystko w całość i pozwolić temu działać! Oto kod robota. Jak zapewne wiesz, są to w zasadzie dwa szkice testowe połączone z dodaną instrukcją if, która kontroluje zachowanie robota. Nadaliśmy mu bardzo proste zachowanie polegające na unikaniu przeszkód: jeśli wykryje coś mniejszego niż cztery cale dalej, wykona kopię zapasową, skręci w lewo i zacznie ponownie się poruszać. Oto wideo bota w akcji.
Daj swojemu robotowi trochę życia
Po poprawnym działaniu tego zachowania możesz dodać bardziej złożone zachowanie; ustaw naprzemiennie obracanie robota w lewo lub w prawo lub wybierz losowo; włącz brzęczyk, jeśli coś się zbliży; po prostu odwróć się, zamiast tworzyć kopię zapasową; jesteś naprawdę ograniczony tylko wyobraźnią. Możesz użyć prawie wszystkiego w zestawie startowym Arduino Co znajduje się w zestawie startowym Arduino? [Początkujący Arduino] Co zawiera zestaw startowy Arduino? [Arduino Beginners] W obliczu pudełka pełnego elementów elektronicznych łatwo jest zostać przytłoczonym. Oto przewodnik po tym, co znajdziesz w swoim zestawie. aby dodać więcej funkcji. Zauważysz również, że nie zakodowaliśmy jeszcze niczego dla serwomechanizmu: możesz faktycznie zrobić robota “oczy” poruszać się tam iz powrotem. być może wykorzystując je do znalezienia ścieżki zamiast cofania się, gdy tylko znajdzie przeszkodę bezpośrednio przed sobą.
Daj nam znać, jeśli zdecydujesz się zbudować tego robota lub innego, i powiedz nam, jak zdecydujesz się dostosować jego zachowanie lub wygląd. Jeśli masz jakieś pytania dotyczące tego robota, opublikuj je w komentarzach poniżej, a zobaczę, czy mogę pomóc!